

Поддержание заданных климатических параметров в теплице – задача, которая неоднократно решалась в области растениеводства. Представленные технические решения для управления микроклиматом в теплице стандартно включают в себя несколько подсистем управления: подсистему контроллера, блок управления, подсистему измерений и мониторинга. В данной структуре подсистемы ввода и вывода информационных потоков о состоянии объекта управления обладают известными способами аппаратной реализации, изменяющимися только в части масштабирования их логики в случае возрастания необходимого количества управляемых величин, но не изменяющими качество динамики процессов в системе. Однако блок управления представляет собой последовательность математических операций, эффективность совокупности которых определяется применяемым методом управления. В связи с этим актуальной темой для проектной и исследовательской деятельности является анализ и синтез систем управления на основе современных методов управления динамическими процессами.
Рассматривая малую крышную теплицу в качестве объекта управления, подобным процессом выступает стабилизация температуры и влаги внутри теплицы. Контроль температуры и влажности в теплице необходимо осуществлять круглосуточно, потому что в разное время суток и фазы развития растений требуются различные параметры микроклимата. При этом возмущающим воздействием на атмосферу в теплице оказывают внешние условия ее содержания, которые также сильно меняются в течение дня.
В период прорастания семян, а также в период цветения растения становятся особенно чувствительными к низким параметрам влажности и температуры. Отклонение параметров от нормы приводит к нарушению вегетационного периода растений, появлению болезней, плоды и листья будут маленькими что приведет к уменьшению фотосинтеза, лечение таких болезней почти невозможно, растение подвергается риску гибели, что ведет за собой экономические потери. Повышенная влажность и температура влечет за собой уменьшении транспирации и потребление воды растением, что тоже негативно влияет на его развитие, это приводит к появлению грибков и плесени, дефициту минералов.
Взаимосвязь этих параметров позволяет нам рассматривать влажность среды, как следствие изменения температуры, тем выше становится потребность в мониторинге температурного режима в теплице. Для стабилизации температуры в теплице при стандартном суточном изменении тепла в окружающей внешней среде или иных хаотических воздействиях, влекущих за собой колебания микроклимата в теплице, традиционно используются методы подчиненного регулирования, например, ПИД-регулятор. В статье рассмотрено проектирование в среде Matlab, Simulink ПИД-регулятора, а также проведено сравнение его с синергетическим методом управления аналитического конструирования агрегированных регуляторов (АКАР) [1].
Основной целью является – разработка системы управления в малой крышной теплице для регулирования температурно-влажностного режима и анализ эффективности двух методов управления. В качестве критерия эффективности выбрано быстродействие управления, то есть снижение инерционности установления требуемой температуры в теплице при возмущающих внешних воздействиях.
Математическое описание объекта управления
В основе рассматриваемой математической модели динамики процесса изменения теплового-влажностного режима в малой крышной теплице лежит несколько допущений. Прирост тепла в системе происходит с помощью теплового электрического нагревателя. Теплица не имеет внутренних перегородок, рассеиванием тепла в пространстве теплицы можно пренебречь, так как она малой площади. В связи с этим полагаем, что температура в теплице основным образом зависит от температуры нагревательного элемента и условий внешней среды. Влажность зависит от количества воды, которую можно нагревать в резервуаре теплицы, тем самым будет происходить испарение воды, то есть увлажнение воздуха. Для мониторинга системы использованы погружной датчик измерения объема воды в резервуаре и датчик влажности и температуры. Регулирование объёма воды будет происходить с помощью насоса. Тогда изменение температуры воздуха в теплице можно представить следующим уравнением
 , (1)
, (1)
где T – время установления температуры в теплице при изменении внешних возмущающих и управляющих воздействиях, измеряется в сек, Q – температура в теплице, Qp – температура теплового электронагревателя, Qb – температура внешней окружающей среды, Qs – разница между температурой внешней среды и температуры теплицы, kp, kb, ks – коэффициенты передачи контуров управления температурой.
Из выражения (1) температура в помещении определяется коэффициентом ks, который характеризует степень теплостойкости теплицы, то есть способ организации материала покрывающего крышу.
Система уравнений, описывающая взаимосвязь динамики нарастания температуры выдаваемой от теплового электронагревателя и внешней среды:
 , (2)
, (2)
где T1 и T2 постоянные времени, определяющие скорость установления температуры в соответствующих подсистемах при изменении внешних условий, K1 и K2 коэффициенты передачи подсистем, U напряжение питания теплового электронагревателя, V – объем сжигаемого природного газа в котле отапливаемого дома, который отапливается газом. Таким образом, уравнение (1) и подсистема уравнений (2) полностью описывают динамику процессов нагрева и охлаждения малой крышной теплицы в частном доме.
Моделирования системы управления
Проектирование динамики процессов в теплице и системы управления температурного режима осуществляется в программном пакете Matlab и его приложении Simulink [2]. Реализация ПИД-регулятора осуществляется с помощью стандартной библиотеки Simulink – PID-Tune. С ее помощью в структурной схеме симуляционной модели теплицы установить блок ПИД-регулятора и перейти к настройке его параметров. Первичное определение параметров ПИД-регулятора выполнялось с помощью методов Зиглера-Никольса и CHR (Chien, Hrones и Reswick) [3, 4]. Однако рассчитанные параметры являются не оптимальными и требуют уточнения. Для этого параметры регулятора варьировались таким образом, чтобы добиться желаемого вида переходной характеристики объекта управления и хорошего запаса устойчивости [5, 6]. Технологические требования к системе автоматического управления зададим следующими показателями качества: время регулирования не более 10 минут при трубке регулирования 3%, желаемый вид переходной характеристики – апериодический, целевое значение температуры в теплице 30ºС. В процессе моделирования были достигнуты значения, представленные на рисунке 1, но как видно из графиков, показатели температурно-влажностного режима не достигают нужных значений.
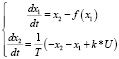
После корректировки коэффициентов ПИД-регулятора (рис. 2) были достигнуты требуемые режимы регулирования.
Исследовательский интерес представляет сравнение результатов управления с помощью подчиненного регулирования в виде ПИД-регулятора и синергетического метода АКАР. Использование метода АКАР при синтезе управления обосновывается тем, что его применение может быть предложено для любых объектов, главным образом для нелинейных, а при взаимодействии со средой даже хорошо изученные линейные системы становятся существенно нелинейными.
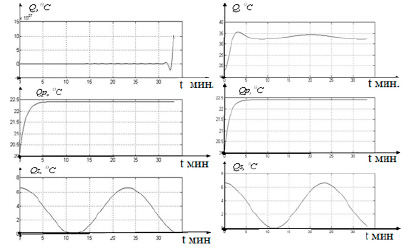
Рис. 1. Температурно-влажностный режим с ПИД-регулятором

Рис. 2. Оптимальный температурно-влажностный режим с ПИД-регулятором
Еще одним преимуществом метода является синтезированный закон управления, представленный в аналитической форме, который учитывает влияние возмущающих воздействий и адаптируется к их изменениям и к изменяющимся параметрам объекта [1, 7].
Для проектирования закона управления рассмотрим в качестве управляющего воздействия напряжение U, подаваемое на тепловой электронагреватель, которое устанавливает температурный режим в теплице. В качестве координат состояния системы обозначим Q = x1, Qp = x2. Тогда (1, 2) можно представить в виде
 (3)
(3)
где f(x1) – это внешнее возмущение.
Согласно методу АКАР в математическое описание управления необходимо внести технологические инваринаты управления или макропеременные ψ1 и ψ2, которые отображают стабилизацию температуры внутри теплицы при изменяющихся внешних условиях
 (4)
(4)
где x10 – стационарное требуемое значение температуры внутри теплицы, φ2(x1) – промежуточное многообразие, выражающее связь между x1 и x2 в силу уравнения (3). Для обеспечения технологических требований необходимо, чтобы введенные макропеременные удовлетворяли функциональным требованиям к системе, а именно апериодическому типу характеристики переходного процесса
 (5)
(5)
Параметры Т1, Т2, определяющие время попадания изображающей точки на пересечение многообразий ψ1 = 0, ψ2 = 0, η1 = 0, η2 = 0, выбираются из условия асимптотической устойчивости системы (5), то есть Т1, Т2 > 0. Решение (5) с учетом (3), (4)
 , (6)
, (6)
 . (7)
. (7)
Аналогично решению уравнения с первой макропеременной для ψ2 с учетом (3), (7) будет
 , (8)
, (8)
 (9)
(9)
Для удобства дальнейших преобразований обозначим константы в уравнении (9)
 и, подставив (3) и (7), выразим искомое управление
и, подставив (3) и (7), выразим искомое управление
 (10)
(10)
Рассмотрим динамику системы с синтезированным законом управления. На рисунке 3 и 4 изображены переходные процессы с учетом влияния внешних неуправляемых возмущений.
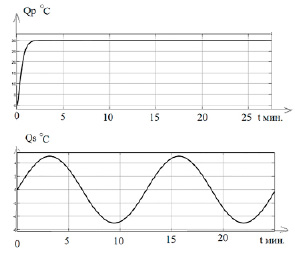
Рис. 3. Температурно-влажностный режим в теплице с синтезированным управлением методом АКАР при синусоидальном возмущающем воздействии
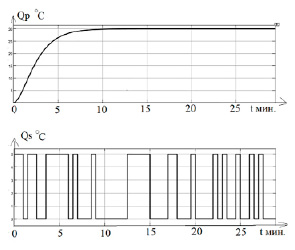
Рис. 4. Температурно-влажностный режим в теплице с синтезированным управлением методом АКАР при возмущающем воздействии в виде прямоугольных импульсов
Полученный закон управления также обеспечивает выполнение технологического требования к работе системы. Более того является оптимальным по параметру быстродействие системы, так как время установления процесса не превышает 7 минут.
Выводы
Модель системы была реализована с помощью пакета прикладных программ MATLAB, для анализа динамики изменения влажности в теплице. С помощью анализа системы доказали адекватность выведенной динамической системы уравнений, математически описывающей температурный режим в теплице. Проведена серия экспериментов, в том числе и цифровых, по оценке работы модели, а также по определению оптимальных режимов температуры и влажности. Анализ двух методов управления показал, что недорогим и эффективным способом регулирования, является реализация управления с помощью введения в цепь обратной связи ПИД-регулятора . Однако наиболее устойчивым к внешним амплитудным воздействиям и оптимальным по быстродействию оказывается управление, реализованное методом АКАР. В результате проведения исследования разработали модель управления с оптимальными режимами регулирования влажности в крышной теплице .
Библиографическая ссылка
Гамалеева Е.И., Гамалеев Д.О. МОДЕЛИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ МИКРОКЛИМАТОМ В МАЛОЙ КРЫШНОЙ ТЕПЛИЦЕ // Материалы МСНК "Студенческий научный форум 2026". 2023. № 14. С. 76-80;URL: https://publish2020.scienceforum.ru/ru/article/view?id=738 (дата обращения: 01.08.2026).