

С каждым годом методики исследования живых организмов, методики моделирования органов людей и животных совершенствуются. В данной статье рассмотрены основные методы моделирования желудочно-кишечного тракта курицы. Данные модели позволяют неинвазивно проводить исследования в процессе разработки препаратов и пробиотиков. Модульность некоторых моделей позволяет удобно вести экспериментальные исследования, сложность других позволяет максимально приблизиться к реальному ЖКТ и упростить этап подготовки биологических образцов. Большинство работающих моделей используется на производстве и скрыто для большого круга людей. Целью данной статьи является обзор существующих методик моделирования и выделение наиболее значимых характеристик и преимуществ той или иной модели. Например, для наиболее приближенных исследований предпочтительно использовать TIM-модели, а для быстроты реализации и проведения частных исследований удобнее использовать SHIME-модели. В данном исследовании, также рассмотрены основные параметры, которые необходимо поддерживать при работе искусственного ЖКТ курицы и определены общие характеристики разработанного нами экспериментального образа с автоматизированной системой управления.
Желудочно-кишечный тракт животных – это сложная система с синергетической и рекурсивной связями. Моделирование процессов данной системы – это трудоемкий процесс, требующий совмещения как ветеринарных, так и технических наук.
Проведение исследовательских работ по моделирования ЖКТ сельскохозяйственных животных значительно упростит разработку различных добавок и препаратов, позволит неинвазивно, искусственно проводить проверку и тестирование разработанных образцов. Системы искусственного ЖКТ значительно повышают производительность исследований и позволяют их ускорить за счет распараллеливания процессов.
Модели желудочно-кишечного тракта животных имеют различные методики управления, поддержания и формирования параметров жидкостей. Вопрос создания искусственной системы ЖКТ человека подробно рассматривался в работах зарубежных ученых Kitty Verhoeckx, Paul Cotter, Iván López-Expósito, Charlotte Kleiveland, Tor Lea, Alan Mackie и других [1]. Но о системах моделирования ЖКТ сельскохозяйственных животных пока мало исследований и большая их часть закрыта для широкого круга людей различными сельскохозяйственными компаниями.
Основные виды in-vitro моделей ЖКТ
TIM-модель
Желудочно-кишечный тракт представляет собой трубчатый орган с различными отделениями (зоб, желудок, тонкая кишка, толстая кишка) для каждой стадии пищеварения [1, 2]. Во время постепенного прохождения пищи через отсеки различные фракции пищи подвергаются воздействию изменяющихся условий из-за постепенной секреции пищеварительных жидкостей и поглощения воды и питательных веществ. ТIМ намеревается смоделировать динамические условия в просвете желудочно-кишечного тракта. Он предназначен для сочетания управляемости и воспроизводимости модельной системы с физиологическими параметрами, такими как смешивание, перемещение пищи и т.д. Схематичное представление данной модели описано на рис. 1 [1, 3].
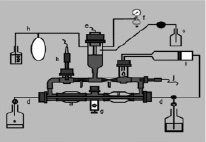
Рис. 1. Схематический рисунок модели толстой кишки TNO in vitro (TIM-2) [1, 3, 5]
Некоторые особенности TIM уникальны по сравнению с другими моделями. Прежде всего, перистальтические движения гибкой мембраны обеспечивают лучшее перемешивание и перемещение компонентов по всей модели, чем это было бы достигнуто при перемешивании (в ферментере) или встряхивании (на качалке или иным способом). В серийных инкубациях или менее сложных моделях микробиота обычно прививается с гораздо меньшей плотностью (в 100 и более раз) и медленно растет до физиологической плотности. Основным минусом является сложность реализации данной системы, относительно сложная структура исключает модульность и накладывает определенные требования к ходу эксперимента [1, 4].
SHIME-модель
Симулятор микробной экосистемы кишечника человека (SHIME) – это многокамерный динамический симулятор кишечника человека, разработанный в 1993 году. Эта разработка многокомпонентных имитаторов (частей) кишечника человека была первой попыткой имитировать условия толстой кишки. Данную модель можно применять при исследованиях любого ЖКТ из-за ее гибкости и модульности. Главным недостатком данной модели является механическая система перемешивания химуса [1, 3, 4].
Основное внимание в системе SHIME уделяется моделированию микробного сообщества толстой кишки. Из-за недоступности области толстой кишки человека или животного для взятия репрезентативного микробного инокулята фекальная микробиота выбирается в качестве инокулята в отсеки толстой кишки реактора SHIME. Другие особенности SHIME включают постепенное опорожнение желудочного дайджеста в кишечное отделение, возможность запуска динамического профиля рН в желудочном отделении и возможность установки диализного блока позади кишечного отделения, чтобы можно было проводить эксперименты с реальными пищевыми матрицами или пищевыми компонентами, которые должны пройти предварительное переваривание и удаление сахарных мономеров или аминокислот и пептидов до того, как химус будет перенесен в кишечное отделение. Структурное описание SHIME-модели представлено на рис. 2 [1].
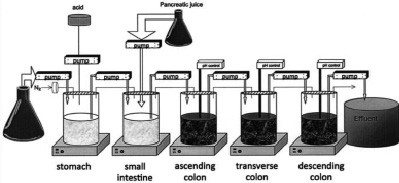
Рис. 2. Схематичное представление SHIME-модели
Исследования. Для проведения собственных исследований была использована рассмотренная ранее SHIME-модель. Поддержание параметров происходит с помощью разработанной автоматизированной системы управления. В созданном биореакторе происходит управление температурой с точностью до 0.0625 °С (диапазон для ЖКТ курицы 40 – 42,5 °С) и pH с точностью до 0.1 pH (диапазон для ЖКТ курицы 1.5 – 2 pH). Также предусмотрено насыщение реактора азотом, что требуется для оптимизации среды в биореакторе. Общий вид разработанной модели представлен на рис. 3 [1, 6].
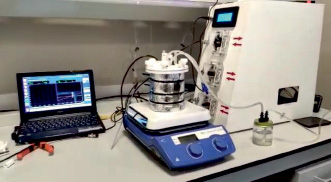
Рис. 3. Общий вид биореактора с системой управления
Таким образом, мы рассмотрели два основных in vitro метода моделирования желудочно-кишечного тракта животных. Данные исследования в данный момент применяются в лаборатории «Центр агробиотехнологии» в ФГБОУ ВО «Донской государственный технический университет».
Исследования выполнялись при финансовой поддержке Министерства науки и высшего образования России в рамках Мегагранта «Ветеринарные пробиотические препараты направленного модулирования здоровья животных» (Соглашение № 075-15-2019-1880) под общим руководством профессора Чикиндаса М.Л., (Rutgers, The State University of New Jersey, USA).